Projects Archive
Micromanipulation with Cilia Arrays - Positioning and Orienting of Microparts (1995-2000)
Team Members
Karl F. Böhringer, Bruce Donald, Greg T. A. Kovacs, John W. Suh
Summary
Distributed manipulation experiments were performed using a massively-parallel, microfabricated actuator array. An organic ciliary array of thin-film polyimide bimorph microactuators exploiting combined thermal and electrostatic control was employed to implement sensorless manipulation strategies for small objects. The tasks of parts-translation, -rotation, -orientation, and -centering were demonstrated using small integrated circuit (IC) dice.
The micromanipulation device (consisting of 4 quadrants of 8 x 8 motion pixels for a total of 256 microactuators) was connected to a PC via the parallel port. Micromanipulation strategies were programmed in a finegrained SIMD (single instruction, multiple data) fashion by specifying programmable force fields. When a part is placed on the device, the programmed vector field induces a force and moment upon it. The part's equilibrium states may be predicted and cascaded (using a sequence of fields) to bring the part to a desired final state.
The experiments suggest that MEMS actuator arrays are useful for parts orientation, posing, transfer, singulation, and sorting.
 |
|
Figure 1: Organic thermal and electrostatic microactuator. Half of the upper polyimide and silicon nitride encapsulation/stiffening layer are shown removed along the cilium's axis of symmetry to show details. (Figure by John Suh) |
Figure 2: Polyimide cilia motion pixel (SEM micrograph). Four actuators in a common center configuration make up a motion pixel. Each cilium is 430 µm long and bends up to 120 µm out of the plane. (Figure by Joh Suh) |
Low-level Control: Actuator Gaits
To induce motion on a part that is placed on the array, the cilia are actuated in a cyclic, gait-like fashion (see Figures 3 and 4). In each cycle, the part is moved in a certain direction by the motion of the actuators that are in contact with it. The speed of the moving part depends on the (horizontal) displacement of the actuators per cycle as well as the frequency of cycle repetition. It also depends on the surface properties and weight of the moving part. Motion in non-principal (e.g. diagonal) directions was effected by a pairwise coupling of neighboring cilia to implement "virtual cilia."
4-phase gaits (click on image for higher resolution). The state of the 4 actuators (north, east, west, south) is encoded with small letters (e.g. n) for down, and capital letters (e.g. S) for up. |
|
 |
 |
Figure 3: Four-phase gait consisting of the four-pattern sequence news neWs nEWs nEws. |
Figure 4: Diagonal gait consisting of the four-pattern sequence news neWS NEWS NEws. The N and E cilia, and the W and S cilia, are coupled to form "virtual cilia" in North-East and South-West directions. |
High-level Control: Orienting and Aligning Parts
If a part is placed in a squeeze field, it will translate and rotate until a stable equilibrium is reached. Parts may exhibit several equilibria, hence after one squeeze the part orientation may be ambiguous. This ambiguity can be removed with programmable force field strategies: by executing a sequence of squeezes at particular angles, the part is uniquely oriented.
   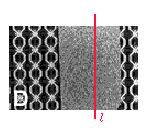 |
Figure 5: Manipulation of silicon chips in programmable vector fields induced by a micro cilia array (microscope video images). The chip is aligned with the vertical squeeze line of the field. (Figures by John Suh) |
Experiments and Results: The part depicted in Figure 5 exhibits a unique stable equilibrium (modulo 180x field symmetry). When placed in a squeeze field, its longitudinal axis aligns with the squeeze line. This dynamical process was predicted by simulation (see Figure 6), and verified in experiment (see Figure 5). Part alignment experiments have also been performed with similar results for several other small pieces of glass and silicon of a few mm length and several mg of mass. It usually takes about 1 - 2 min to reach equilibrium.
 |
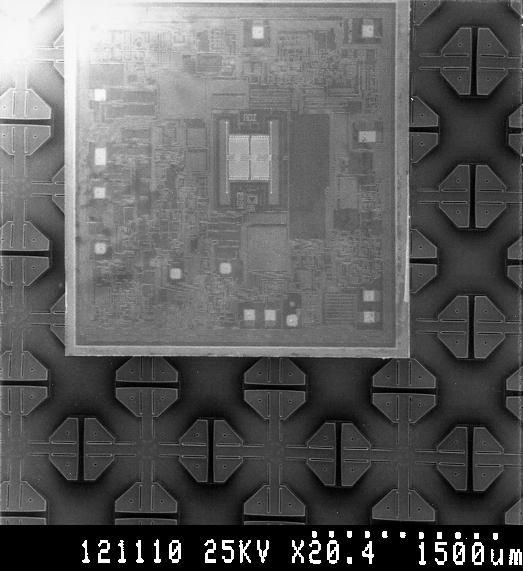 |
Figure 6: Simulation of part orienting / aligning with a squeeze field. In an ideal squeeze field, at each point in the plane a unit force points perpendicularly towards the center line (the "squeeze line"). |
Figure 7: Micro cilia device moving an ADXL50 accelerometer chip (courtesy of Dr. R. Payne, Analog Devices, Inc.); its size is 2.7mm squared. The SEM micrograph shows a portion of the cilia chip, which consists of an 8 x 8 array of motion pixels. The entire device includes four cilia chips that can be controlled independently to generate complex programmable force fields. (Figure by John Suh) |
High-level Control: Rotating Parts
Certain parts will rotate indefinitely in skewed squeeze fields (see Figure 8). Note that even though our cilia device has more degrees of freedom, two areas of constant force are sufficient to implement a skewed field, resulting in a very simple rotation strategy. In particular, the rotation algorithm resulting from the application of skew-symmetric squeeze fields is simpler than rotation with four-quadrant vortices.
Experiments and Results: Figure 8 shows video frames of a 3 x 3 mm2 IC chip rotating on the squeeze line of a skewed field. During the experiments of approximately 10 min, several full rotations of the part were performed.
 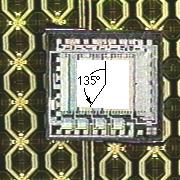 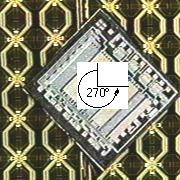 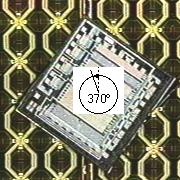 |
Figure 8: Manipulation of silicon chips in programmable vector fields induced by a micro cilia array (microscope video images). The chip is aligned with the vertical squeeze line of the field. (Figures by John Suh) |
Videos
Selected Publications
-
J. W. Suh, R. B. Darling, K. F. Böhringer, B. R. Donald, H. Baltes, G. T. A. Kovacs, "Fully Programmable MEMS Ciliary Actuator Arrays for Micromanipulation Tasks." IEEE International Conference on Robotics and Automation (ICRA), pp. 1101-1108, San Francisco, CA, April 2000. Paper.
-
J. W. Suh, R. B. Darling, K. F. Böhringer, B. R. Donald, H. Baltes, G. T. A. Kovacs, "CMOS Integrated Organic Ciliary Array as a General-Purpose Micromanipulation Tool for Small Objects." Journal of Microelectromechanical Systems, 8(4):483-496, December 1999. Paper.
-
K. F. Böhringer, B. R. Donald, N. C. MacDonald, G. T. A. Kovacs, J. W. Suh, "Computational Methods for Design and Control of MEMS Micromanipulator Arrays." IEEE Computational Science and Engineering, 4(1):17-29, January-March 1997. Paper.
-
K. F. Böhringer, J. F. Suh, B. R. Donald, G. T. A. Kovacs, "Vector Fields for Task-level Distributed Manipulation: Experiments with Organic Micro Actuator Arrays." IEEE International Conference on Robotics and Automation (ICRA), pp. 1779-1786, Albuquerque, New Mexico, April 20-25, 1997. Paper.
A complete list of our publications (many of them available online) can be found here.
Acknowledgements
-
DARPA N001-92-J-1940-P00001
-
General Motors Key grant
-
NSF ECS- 9358289-006
-
NSF IRI-8802390, IRI-9000532, IRI-9530785, 9802068, CDA-9726389, EIA-9818299, CISE/CDA-9805548, IRI-9896020, IIS-9906790, EIA-9901407, NSF/DARPA SGER IRI-9403903
-
CISE Postdoctoral Associateship CDA-9705022 and NSF CAREER award ECS-9875367 to Karl F. Böhringer
-
Air Force Office of Scientific Research (AFSOR), the Mathematical Sciences Institute, Intel Corporation, and AT&T Bell Laboratories; and in part by DARPA DABT63-69-C-0019